PackerBot: Variable-Sized Product Packing
with Heuristic Deep Reinforcement Learning
School of Control Science and Engineering, Shandong University, 250061, Jinan, China
Abstract
Product packing is a typical application in warehouse automation that aims to pick objects from unstructured piles and place them into bins with optimized placing policy. However, it still remains a significant challenge to finish the product packing tasks in general logistics scenarios where the objects are variable-sized and the configurations are complex. In this work, we present the PackerBot, a complete robotic pipeline for performing variable-sized product packing in unstructured scenes. First, by leveraging the imperfect experience of human packer, we propose a heuristic DRL framework for learning optimal online 3D bin packing policy. Then we integrate it with a 6-DoF suction-based picking module and a product size estimation module, leading to a complete product packing system, namely the PackerBot. Extensive experimental results show that our method achieves the state-of-the-art performance in both simulated and real-world tests.
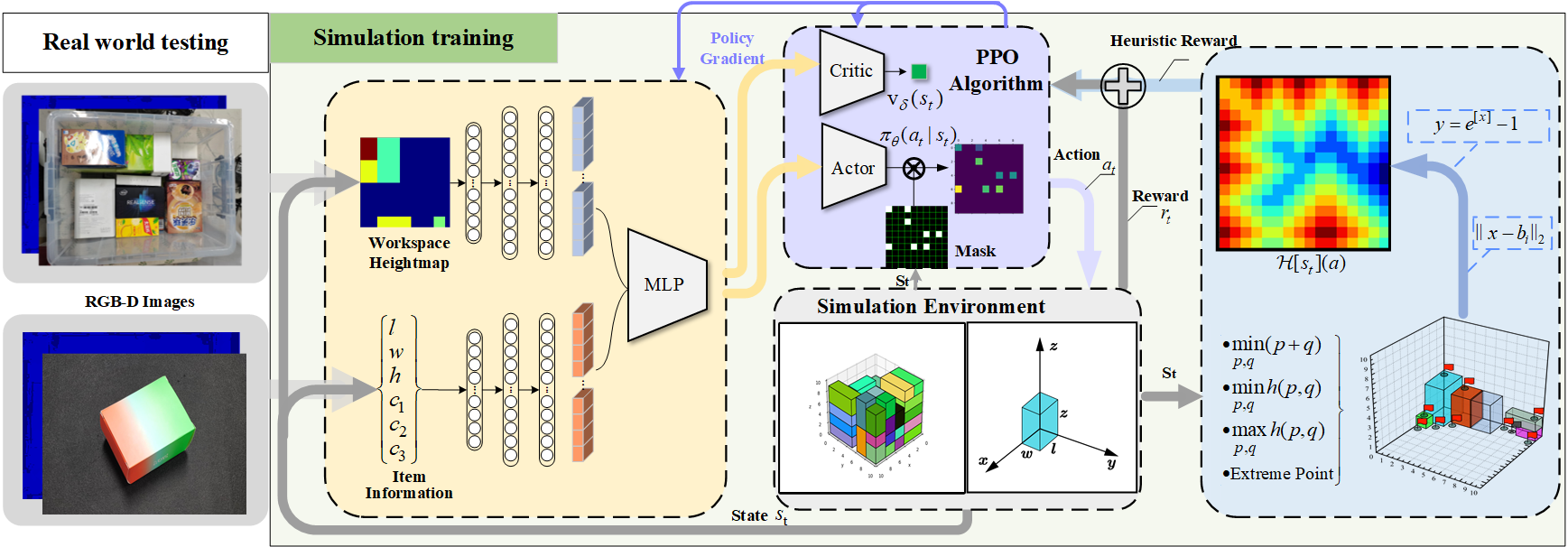
Overview of our heuristic deep reinforcement learning model for variable-sized 3D product packing.
Video
If you cannot access the website, please click here.