| Home | Leader Board | Datasets | Submit Result | References | Contact Us | Liscense |
Welcome to Matterport3d-Layout Dataset website.
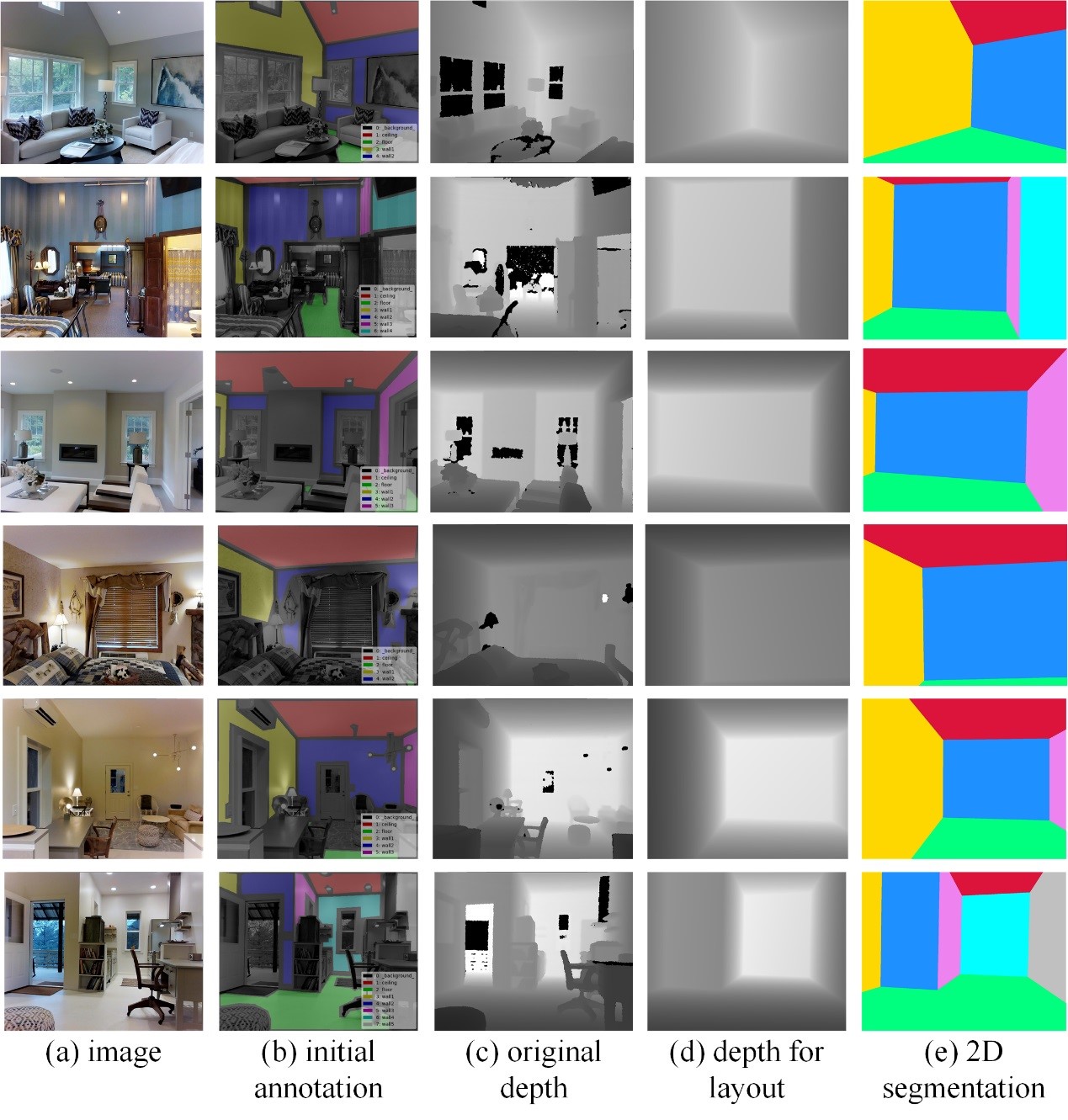
We construct a new [Dataset](#dataset) for layout estimation, which contains pixel-wise depth label for the dominant planes of the room images. Our [dataset](#dataset) uses the indoor images and depth maps from the Matterport3D dataset [1], which has large-scale RGB-D data in indoor scenes. All the images have the resolution of 1024x1280 with their origins in the top-left of the image.
The original Matterport3D dataset includes 90 distinct buildings. we randomly split the dataset by the buildings. The training set includes 64 buildings with a total of 4939 images. The validation set includes 6 buildings with 456 images. The testing data includes the rest 20 buildings with a total of 1965 images. The dataset contains the following data field:
(1) Color image;
(2) Depth map of the planar surfaces (16 bit PNG image, divide by 4000 to get meters);
(3) 2D segmentation of layout;
(4) Original depth map containing indoor objects;
(5) Visible region annotation;
(6) Intrinsic matrix of the camera;
(7) Surface parameters p, q, r (the pixel coordinates should be normalized between 0 and 1 to calculate the depth maps);
(8) The coordinates of the layout corners (u,v,Z);
(9) Original surface normal.
Leader Board
| Method | epix.(%) | ecor.(%) | e3Dcor.(%) | RMS | REL | log10 | δ<1.25 | δ<1.252 | δ<1.253 |
|---|---|---|---|---|---|---|---|---|---|
| Ours | 5.24 | 4.36 | 12.82 | 0.456 | 0.111 | 0.047 | 0.892 | 0.975 | 0.994 |
Dataset Download
You should first request access to Matterport3D dataset as our dataset is based on Matterport3D. Please fill and sign the Terms of Use agreement form and send it to matterport3d@googlegroups.com to request access to Matterport3D dataset. If your request is approved, please send us their reply email to get access to our dataset.
Submit Your Result
The testing set contains only (1) Color image and (6) Intrinsic matrix of the camera. Please submit your layout estimation result of the testing set to email info@vsislab.com or chluzhre@gmail.com for performance evaluation. Please note to keep your information correct.
What to submit
A matlab structure containing the following fields:
-
point (u, v, Z) coordinates of the layout corners. u and v are the pixel coordinates with the oringin in the top-left of the image. Z is the depth.
-
layout The room layout segmentation mask.
-
depth The depth map of the surfaces.
The result should be a single file in HDF5 format (the default format from “save” function in Matlab).
References
[1] Angel Chang, Angela Dai, Thomas Funkhouser, Maciej Halber, Matthias Niessner, Manolis Savva, Shuran Song, Andy Zeng, and Yinda Zhang. Matterport3d: Learning from rgb-d data in indoor environments. International Conference on 3D Vision (3DV), 2017.
Contact Us
| info@vsislab.com, chluzhre@gmail.com, yindaz@gmail.com |
License
The original data from Matterport3D dataset is released under Terms of Use agreement. The part of our layout annotation and generated data is under MIT Liscence.
Copyright © 2019VSISLab.